智能汽车人员损伤风险动态预测方法
道路交通事故是全球性范围内的重大公共安全问题。由于诸多不可控因素的存在(如自车软硬件故障、行车环境恶劣等),道路交通事故仍将在未来长期存在。智能汽车凭借感知与潜在的决策能力,有望显著改善道路交通安全水平。现有安全决策通常关注规避碰撞的算法,而在面对不可避免碰撞事故场景时,忽视了在碰撞前关键时间窗口内降低伤亡风险的巨大潜力。主要技术瓶颈在于:人-车-路系统具有非线性、高动态、强耦合特性,难以准确、实时、量化评估危险场景下交通参与者(“人”)的损伤风险。
车辆学院周青、聂冰冰团队提出了危险场景智能汽车人员损伤风险动态预测方法。其核心算法(Injury Risk Mitigation-based algorithm,IRM)包括三个模块:首先,对积累的大量事故数据进行基于专家经验的清洗和预处理,建立数据驱动的人员损伤风险量化预测模型;其次,以实时更新的损伤风险预测为参考,提出了不可避免事故场景安全决策算法,在事故前约一秒时间窗口内滚动优化调整车辆行驶策略,实现损伤风险最小化;最后,依据中国交通事故深入调查(CIDAS)数据作为测试场景,量化评估人类驾驶员和该安全决策算法的损伤风险降低效果(图1)。
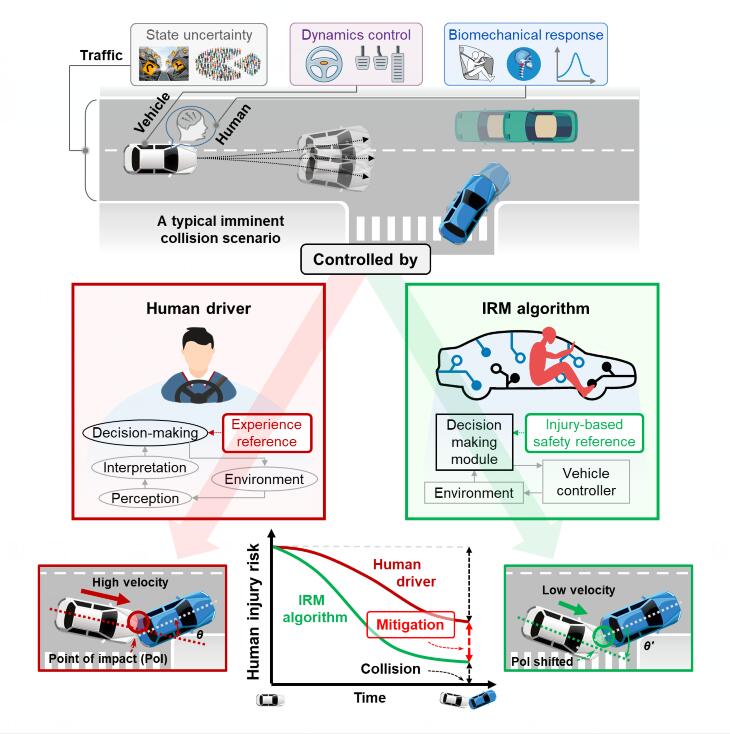
图1. 基于量化人员风险的决策算法提升汽车安全水平
相比于人类驾驶员与现有技术,IRM算法将损伤预测技术与智能汽车安全决策算法相结合,通过优化车辆运动学状态(如行驶速度、方向等)和碰撞位置,显著降低人员损伤程度(图2),克服了现有安全决策对人的损伤风险考虑欠优的问题。结果表明,数据驱动的损伤预测模型凭借其优异的数据挖掘能力,自主发掘了“埋藏”在积累的大量事故数据中的物理规律,在专家经验干预下,形成了部分可解释的模型,从而为决策提供参考。同时,针对危险场景智能汽车涉及的“电车难题”困境,该研究从技术层面上给出了对不同决策的评估结果,以期为进一步决策优化提供量化参考。

图2. 利用真实交通事故数据评估IRM算法的损伤风险降低效果
该研究以“基于人的损伤风险的自动驾驶汽车安全决策”(Human injury-based safety decision of automated vehicles)为题发表在《细胞》(Cell)出版集团期刊《交叉科学》(iScience)上。
论文第一作者为清华大学车辆学院2020级博士生王情帆,通讯作者为车辆学院聂冰冰副教授。清华大学车辆学院周青教授、中国汽车技术研究中心数据中心副总工程师林淼共同参与了本研究工作。研究得到了国家自然科学基金与清华-丰田联合研究基金专项项目支持。(来源:清华大学)